|
")
Like every urban area, European cities suffer from cumulating trash, especially in places where cleaners cannot reach bins. Classic historical towns and cities lack the work force needed to do the cleaning job; therefore, the EU has decided to fund the DustBot project—which invented the DustCart, understanding its importance – improving pedestrians’ experience in European cities, as well as upgrading current cleaning methods. The DustCart reduces amounts of trash by increasing the efficiency of trash-bin eviction.
The DustBot is operated via a phone call: All citizens need to do is call a designated service, which controls the robot. It will go outside from its dispatch center, automatically locate the caller’s bin, and have it emptied. Afterwards it will go on to the next caller. Although one might think the robot is a mere mobile bin, it actually has many advanced sense and control technologies.
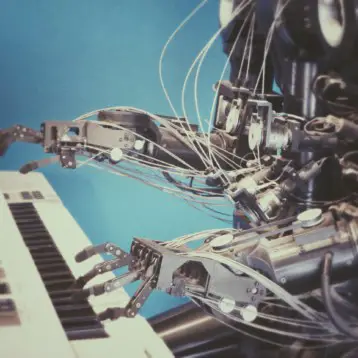
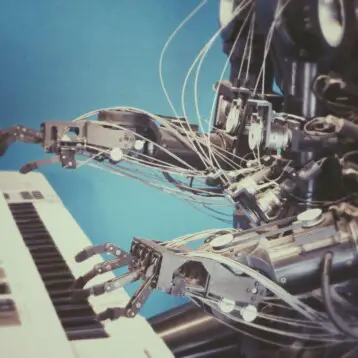
“We’ve taken the very best and most advanced robotics components to build DustCart, which solves a very real problem for waste authorities across Europe,” explains professor Paolo Dario, the coordinator of DustBot. “Yes, it is a bin on wheels – there’s the drawer in which you place your bag of rubbish or recycling – but there’s a lot more to the robot than that.”
The state-of-the-art technologies make DustCart almost fully autonomous; mounted on the robot are cameras and other sensors so it can “see” where it is going. It scans the path ahead and processes the information to avoid stationary objects. Also avoided are moving objects, such as pedestrians and bicycles, and up to now, zero collisions were recorded. Aside from using the visual images to process potential obstacles, they also travel to a control center, where human operators can verify that all is going well. In case something goes wrong, they intervene and manually operate the robot.
“It is the dream of every robotics researcher to develop a fully automated and intelligent system,” says Dario, with excitement in his eyes. DustCart knows its way around thanks to its sophisticated navigation system. It is a triangulation system, which interacts with a wireless network set up across the robot’s area of operation. The network pinpoints the robot; then, it sends optimal routes between pick-ups, calculated by the center’s system. Dario is convinced that DustCart is different from similar projects. “The robot ‘talks’ to its surroundings and the surroundings communicate back. This means the robot has access to a lot more information and computing power,” he said.
|
")
According to Dario, DustCart has three levels of intelligent control. The first is the autonomous, built-in systems including motion sensing, obstacle avoidance, and user-interface functions including speech recognition. The second is the ambient intelligent environment, designed to supervise the robot, send it commands, and navigate it through the streets. The third is the aforementioned human control center; most of the time it just monitors the robot’s operations, but intervention is always possible in emergency cases or when technology fails. Obviously, the human operators provide security for the robot, “just in case anyone tries to steal or tamper with it,” says Dario.
The project DustCart has demonstrated its effectiveness in six European locations, and two in Japan and one in South Korea (see this YouTube to see its demonstration in South Korea). Its funding is from the Sixth Framework Programme for research. Although it ended in December 2009, the researchers are continuing development. “We have substantial information on the performance of the system and its safety, and we have had no major failures yet and no safety breaches,” said Dario.
Dario estimates the potential market size by at least 100,000 units across Europe. “We’ve heard from several interested municipalities, but investors need to know that there is a credible market for the system, that residents will favor the new approach,” he said. “We have talked to numerous potential investors and could raise several million euros in investment, but there first needs to be more evaluation. If this trial is successful we will immediately work to raise the cash and hope to begin early development of a commercial system by the end of 2010.”
One must compare the commercial applicability of DustCart to door-to-door waste and recycling collections that most people have today. Moreover, it is likely that the convenient service should help increase recycling rates. “There’s a really strong financial and environmental case for this ‘on-demand’ approach,” Dario concludes.
TFOT has also covered a solar-powered trash compactor, which can hold up to five times as much trash as a similarly sized regular trash receptacle, and a kitchen cleaning robot, which can perform up to 40% of common household daily chores. Another related TFOT story is Arkenol; a different technology that turns garbage into ethanol.
For more information about the DustCart project, see its website.