Generally speaking, walking robots can be divided into two groups. The first group includes robots that walk according to principles from the world of industrial robots, in which everything is codified into routines. A good example of such a robot is the Japanese robot ASIMO. The disadvantage of this method of walking is that it is very costly and energy consuming. The second group of walking robots, including Flame, is designed to mimic human walking in the sense that the robot is executing a controlled fall forward.
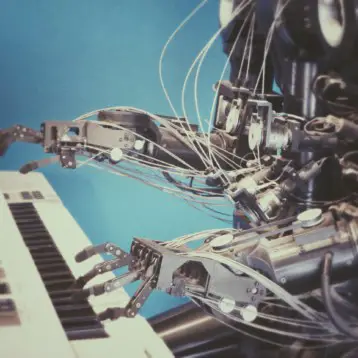
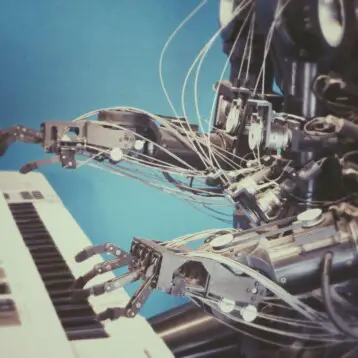
Flame weighs approximately 15 kg and is about 1.3 m high. It has seven motors and manages to remain very stable thanks to an “organ of balance” and a series of algorithms that calculate where and how far apart the robot’s ‘feet’ should be placed in order for it not to fall. Flame’s upper body contains a PC104 computer that has a real-time Linux kernel (RTAI) running a control loop, which implements torque and/or position control on all actuated joints.
“Flame is our first fully 3D walking robot with electric actuation. As in Meta, Maxon DC motors are used to actuate several joints: two sagittal ankle joints, two sagittal knee joints, two sagittal hip joints, and one lateral hip joint (for sideways foot placement). All the actuated joints in the sagittal plane are implemented with a series of elastic elements that allow the application of torque control. Next to the actuation, all joints are equipped with incremental encoders that measure all joint angles and indirectly, the elongation of the elastic elements”, explains Daan Hobbelen.
Future plans at TU Delft include developing walking robots capable of learning and running, as well as developing football-playing robots. A short video of Flame walking is available here.
TFOT has covered Toyota’s violin playing robot that can even achieve vibrato. This innovative robot uses precise control and coordination to achieve human-like dexterity. TFOT also covered the development of a self-modeling robot that can generate successful motor patterns for locomotion by creating an “internal model” of itself so that even if some if its parts are damaged it adapts to the new situation. In addition, TFOT reported on South Korea’s promotion of an ethics charter for robots. The new ethical charter will set standards for both users and manufacturers of robots.
More information on Flame is available on TU Delft’s official website.